| Código de
catalogación:
M4 Dimensiones:
Materiales:
Datación:
Autor catalogación:
|
|
|
|
|
|
| Descripción:
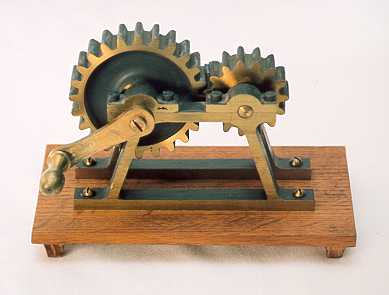
La rueda dentada mostrada en la figura es un sistema de ruedas y ejes,
es decir, uno de los seis tipos de máquinas
simples. Como sabemos, la rueda y un eje pueden multiplicar la fuerza
pero cambian muy poco el momento de torsión. por otro lado, no afectan
a la velocidad de rotación: cada revolución de la rueda produce
exactamente una revolución del eje. Un sistema de ruedas y ejes,
en cambio, puede utilizarse para variar ambos parámetros. La manera
más simple y barata para hacer esto consiste en conectar las ruedas
por medio de una banda de rozamiento continuo (ver la banda
de transmisión de velocidad variable), aunque otro método
consiste en la utilización de engranajes, como ocurre en el caso
que nos ocupa. Aclaremos, no obstante, que ambos dispositivos no son exactamente
equivalentes desde el punto de vista práctico, puesto que los engranajes
entrelazados giran en sentidos opuestos a diferencia de las ruedas (llamadas
usualmente poleas) de que consta una transmisión de banda.
Aplicaciones Didácticas:
Como se observa en la figura, la manivela se encuentra en el engranaje
de mayor tamaño (24 dientes), que es el engranaje transmisor. El
pequeño, es decir, el receptor consta de 15 dientes. Se puede llevar
a cabo una sencilla demostración colocando una pequeña pegatina
en uno de los dientes del engranaje transmisor y en otro del receptor.
Activando la manivela se apreciará: a) que las pegatinas (ambos
engranajes) giran en sentido contrario; b) que la pegatina situada en el
engranaje receptor gira más rápidamente que la situada en
el engranaje transmisor, es decir, que este engranaje cilíndrico
permite alterar la frecuencia o velocidad de rotación.
RT = (nº de dientes del engranaje receptor) / (nº de dientes del engranaje transmisor) Para nuestro caso RT = 0.625 La RT aparece en un número de fórmulas importantes, a saber: 1) frecuencia de salida = (frecuencia de entrada) / RT 2) Momento de torsión salida = (eficiencia) x (momento de torsión entrada) x (RT) donde la eficiencia es: 3) eficiencia = (trabajo útil producido) / (trabajo suministrado) Aplicando 1) con nuestro valor de RT
vemos que una frecuencia de entrada de 1 r.p.m se traduciría en
una frecuencia de salida de 1.6 r.p.m.
|
![]()